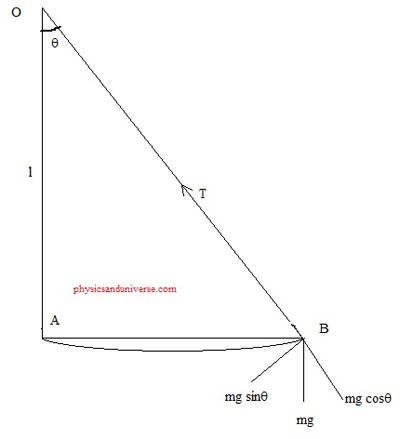
A simple pendulum is a heavy mass (bob) suspended by very low weight inextensible and flexible string which undergo to and fro motion in a plane from mean position. This to and fro motion of pendulum becomes simple harmonic motion for small angle of oscillation. Let is consider a simple pendulum with mass ‘m’ and length of the string as ‘l’. Let us displace the bob from mean position by small angle 

1. mg, the weight of bob acting vertically downward.
2. Tension of the string T with direction towards the point of suspension
3. 
4. 
When the bob is at rest the component T and
The force



We also have
If we assume that l is very long and

Using this value of 


The negative sign indicate that the acceleration is towards the mean position. In a pendulum we can assume that length of pendulum ‘l’ is constant and so is ‘g’. Hence we get

Now see that the acceleration of bob is proportional to displacement and is directed towards the mean position, we can say the the motion is Simple Harmonic Motion. Therefore we have
Comparing equations (1) and (2) we get


This equation gives the time period of a simple pendulum if we know the value of ‘g’ and ‘l’.

{kind=link}